圖片:
圖片:
圖片:
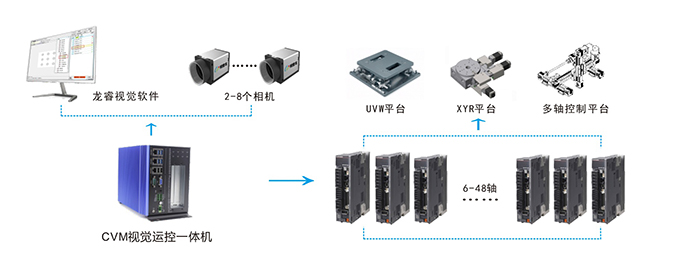
傳統(tǒng)視覺與運動控制項目一般采用視覺系統(tǒng)+PLC或運動控制卡的形式,需要不同的編程人員參與,存在一定難度,需要花費大量時間和精力。視覺龍創(chuàng)新產(chǎn)品“CVM視覺與運動控制一體機”打破傳統(tǒng)控制流程,不需要開發(fā)人員參與,調(diào)試人員就可以完成整個項目。大幅降低應(yīng)用門檻,縮短項目時間,降低項目成本,售后維護簡單,將視覺與運動控制項目簡單化。
項目實例
視覺龍“龍馬”運控軟件采用圖形化來表示控制編程邏輯,簡單易用,支持多品牌運動控制如雷賽、固高等;支持單軸和多軸點位運動;支持多軸插補運動,如直線、圓弧;支持位置比較功能(飛拍);支持多種運動模型,如碼垛等。
此例程為標簽自動貼合設(shè)備電控+視覺定位程序介紹
設(shè)置2個設(shè)置插補軸坐標系,一個3軸,一個2軸。
00程序:運動到糾偏拍照點
01程序:運動到糾偏拍照點
02程序:給視覺系統(tǒng)發(fā)出拍照指令
03程序:接收到視覺系統(tǒng)糾偏指令進行糾偏
04程序:運動到復檢拍照點,發(fā)出復檢拍照指令
00程序:DI0輸入上升沿信號,RXY軸運動到0,100000,-100000后發(fā)出通知事件1。
01程序:通知事件101有效,RXY軸運動到0,100000,-100000后發(fā)出通知事件1。
02程序:通知事件1有效,延時后發(fā)出通信指令rofA0A100000A-100000,其中A為間隔符,由視覺軟件設(shè)置。
03程序:通知事件100有效(有視覺軟件發(fā)出),按照視覺發(fā)出的糾偏坐標進行糾偏,糾偏完成后發(fā)出通知事件。
04程序:通知事件有效,延時后發(fā)出通信指令robA100000A-100000,觸發(fā)視覺任務(wù)5進行復檢。
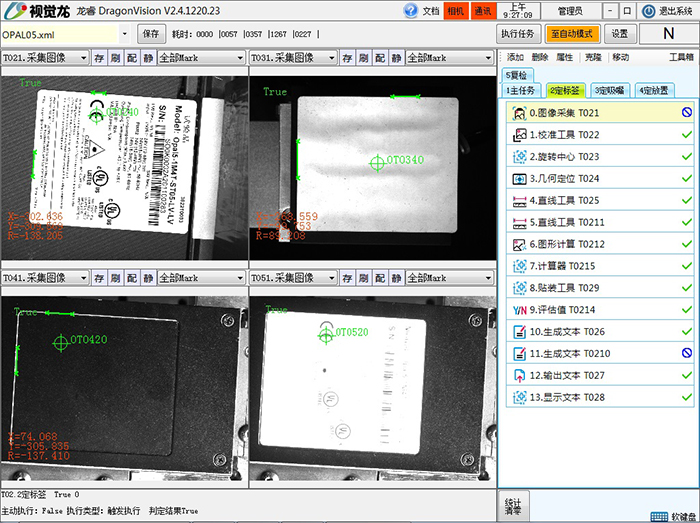
采用視覺龍自主研發(fā)的“龍睿”視覺軟件定位引導算法,定位精度可達到1/40亞像素。支持多種運動平臺定位和對位功能,可以實現(xiàn)裝配、上下料、傳送帶跟蹤、打磨、碼垛、切割、打標等應(yīng)用。
視覺系統(tǒng)定位標簽位置
視覺系統(tǒng)定位標簽在吸嘴上位置
視覺系統(tǒng)定位貼合產(chǎn)品的位置
視覺系統(tǒng)復檢最終貼合狀態(tài)
視覺系統(tǒng)計算出糾偏絕對位置坐標,生產(chǎn)數(shù)據(jù)格式為 WRITE#XYR#/-74.836/-305.300/-137.200
運動系統(tǒng)運動到該位置,完成糾偏。
 滬公網(wǎng)安備31010802001143號
滬公網(wǎng)安備31010802001143號

