很多新手會遇到這個問題,而且在剛入門的時候會覺得這是個大難題。我也曾經這樣認為。畢竟這三樣無一不是系統控制的大基礎,不管是PLC,還是單片機,還是其他運動控制卡,等等模式,最終,只要你要控制伺服或者步進進行旋轉,就必然要涉及到信號線的制作,驅動器參數的正確設置(往往看到說明書上的參數密密麻麻一大堆,不知道調哪個),以及脈沖與實際行程的比例或者說放大倍數(通俗的解釋齒輪比的含義)。鑒于此,我們來慢慢、通俗的說下各種伺服以及步進的CN1端子(大部分都是CN1,即驅動器與PLC的信號連接)如何接線,以及要調整的參數。如果有錯誤的地方,還請大家批評指正啊。呵呵
以三菱mr-e-200a-kH003 這個型號的驅動器為例(隨便找的個,其他牌子陸續跟上)。首先,要找到對應驅動器的說明書。詳細的查看每一個環節,特別是驅動器與電機是否匹配。一般在驅動器說明書的前面都給了有匹配表。在驅動器參數設置里,也會有個匹配參數。

一定要找到對應的匹配,否則驅動器無法識別伺服。還有個問題,就是大部分驅動器會自動檢索電機并調整匹配參數,但有時候,比如接手的可能是混雜的舊驅動器與舊伺服,那你就最好找到一個參數,叫恢復出廠設置。把所有參數全部回到出廠狀態,再從新一個一個調整。注意,不同驅動器有著不同的參數設置習慣。上電下電保存參數的先后順序一定要搞清楚。
那么,這步做完后,其實先要做的是JOG測試。而不是急急忙忙的開始做信號線。就是把驅動器電源線接好,并連接到伺服;然后把編碼器線接好也連接到伺服。找到驅動器說明書中的JOG測試參數。按照說明書指示步驟,進行JOG的正反轉測試。可以適當調整速度。看正反轉是否正常,并且運行是否流暢,有沒有雜音,伺服沒有發熱抖動以及啟動報警,驅動器散熱風扇運轉是否正常等,就說明你的驅動器與伺服匹配好了沒,也得出了電源(電源線)、編碼器(編碼器線)、伺服跟驅動器都是不是好的結論。做完這步,就可以放心進行信號端子的接線工作了。
在實際工程中,你在選伺服的時候就應該考慮此工程是用那種控制模式來實現,具體到伺服的控制模式,往往也是新手迷惑的地方,比如位置控制模式,轉矩控制模式,速度控制模式,全閉環控制模式,開環控制模式等等。再具體點,位置控制模式里有差分或者集電極開路等模式,有的伺服甚至分的更細,轉矩與速度模式也有細分。面對如此多的模式,真是讓人欲哭無淚,有種無從下手的感覺吧。呵呵。在這里我就不詳細去解說各種模式的應用了。要想搞懂這些,先學下電工學電子電路學,再去家園等網站找資料吧。現在就以最普通的集電極開路位置控制模式來具體說下如何接線跟驅動器參數調節。
首先,你要找到驅動器說明書上的接線圖。比如:

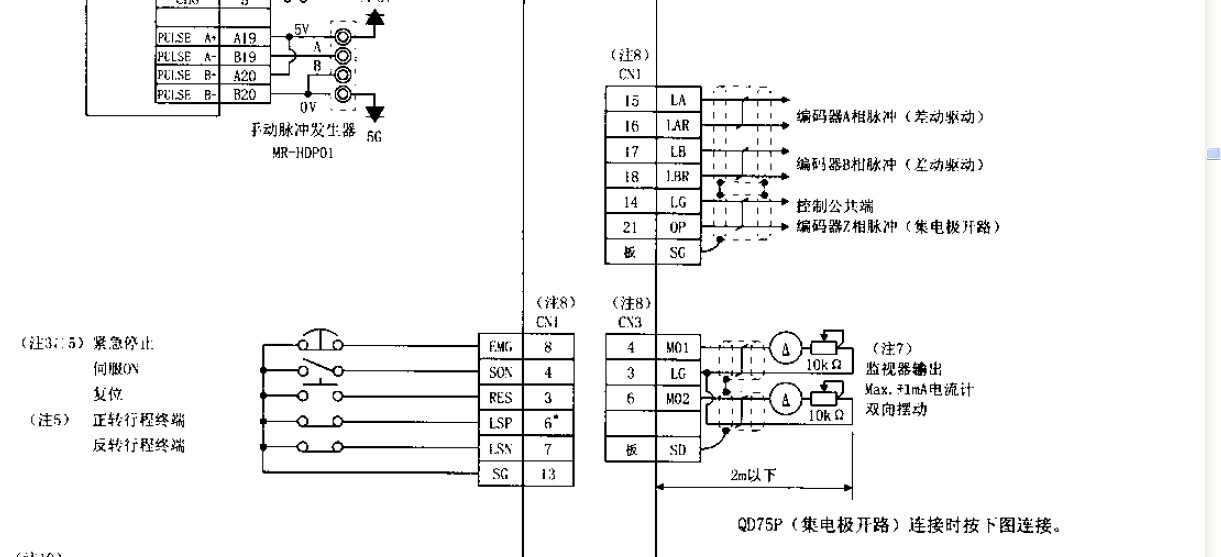
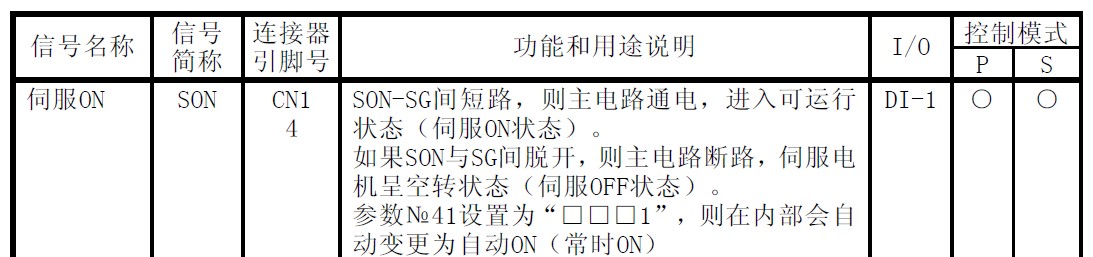
其實,上面這張圖對于一個剛入行的同行來說,照樣是個難點。這么多符號,這么多端子,到底哪些才是我們需要的地。其實,驅動器說明書里都有專門列表,列出了常用端子的常用功能,比如:


當然。這個表只是個簡易介紹表。后面還有更詳細的功能說明表。由于參數太多。下面我就只列出基本的幾個。



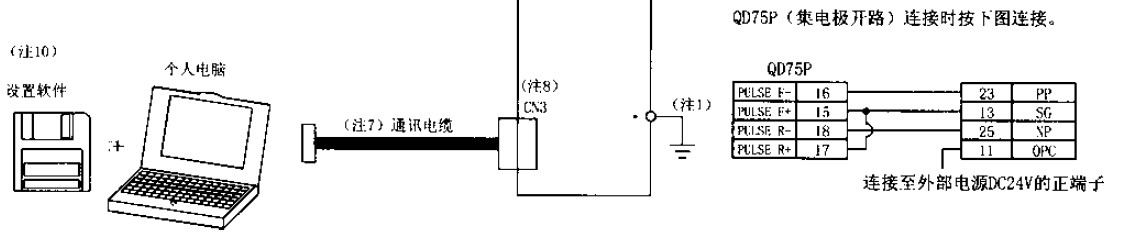
對于集電極開路呢,如果僅僅是發脈沖讓伺服做絕對定位啊,相對定位啊什么的。其實就這么幾個端子就夠。
SON------接PLC輸出點(Y7)
VIN--------DC24+
SG--------DC24-
PG--------接PLC的X軸脈沖輸出(Y0)
PP--------1。2千歐(1/4瓦)電阻-------DC24-
NG--------接PLC的X軸方向輸出(Y4)
NP1。2千歐(1/4瓦)電阻-------DC24-
由于有的驅動器內部提供有DC24+,那可以將內部24+輸出與電源公共端直接焊起來。上述接線呢,就要實際動手去接,然后在PLC里隨便寫個發脈沖的指令,寫個使能的指令。運行下就知道問題出在哪了。這里就不詳細解釋了。因為幾乎所有伺服接線都大同小異,都是這幾個基本端子啊。
關于電子齒輪比的計算,本來我還打算給你詳細講解下的,但我看到了高手(銘杰工控)更詳細的解釋,也是家園的牛B人物啊。我附加上地址,你自己看看吧。
http://rob-thebuilder.com/read-gktid-143193.html那么,把通信線做好后連到PLC。并且測試用PLC發脈沖能運行了。就要仔細調節驅動器參數了。在這里我大致列舉一下要調節的參數。
(1)控制模式(要選擇你需要的模式,一般就是位置控制模式)
(2)SON使能機能選擇(有的伺服提供了幾種伺服使能模式)
(3)電機旋轉方向設定(根據實際工程需要設定旋轉正方向)
(4)負載慣量比(這個對于新手來說,開始就默認出廠設置,如果出現帶負載運行對應某報警,可以適當調節它;有個帖子比較科學的闡述了如何計算,自己去看)
http://rob-thebuilder.com/read-gktid-143723.html(5)剛性設定(這個是比較常調的,自己去摸索吧)
(6)脈沖型式(比如脈沖+符號,正轉+反轉,AB相等)
(7)脈沖邏輯(正邏輯,負邏輯)
(8)電子齒輪分子,電子齒輪分母
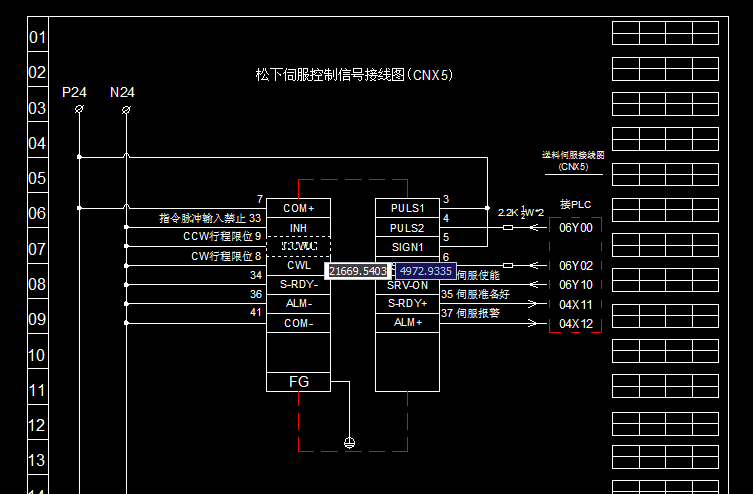
要說重要參數,就這些了。這里再附帶一張松下A4伺服的接線圖,也是家園某同仁提供的,也可以參考下。
[ 此帖被chinazhu6666在2012-04-02 10:16重新編輯 ]
 滬公網安備31010802001143號
滬公網安備31010802001143號

