伺服電機編碼器相位與轉子磁極相位零點如何對齊的問題
永磁交流伺服電機的編碼器相位為何要與轉子磁極相位對齊
其唯一目的就是要達成矢量控制的目標,使d軸勵磁分量和q軸出力分量解耦,令永磁交流伺服電機定子繞組產生的電磁場始終正交于轉子永磁場,從而獲得最佳的出力效果,即“類直流特性”,這種控制方法也被稱為磁場定向控制(FOC),達成FOC控制目標的外在表現就是永磁交流伺服電機的“相電流”波形始終與“相反電勢”波形保持一致,如下圖所示:
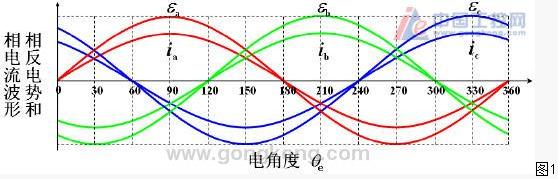
因此反推可知,只要想辦法令永磁交流伺服電機的“相電流”波形始終與“相反電勢”波形保持一致,就可以達成FOC控制目標,使永磁交流伺服電機的初級電磁場與磁極永磁場正交,即波形間互差90度電角度,如下圖所示:

如何想辦法使永磁交流伺服電機的“相電流”波形始終與“相反電勢”波形保持一致呢?由圖1可知,只要能夠隨時檢測到正弦型反電勢波形的電角度相位,然后就可以相對容易地根據此相位生成與反電勢波形一致的正弦型相電流波形了,因此相位對齊就可以轉化為編碼器相位與反電勢波形相位的對齊關系。
在實際操作中,歐美廠商習慣于采用給電機的繞組通以小于額定電流的直流電流使電機轉子定向的方法來對齊編碼器和轉子磁極的相位。當電機的繞組通入小于額定電流的直流電流時,在無外力條件下,初級電磁場與磁極永磁場相互作用,會相互吸引并定位至互差0度相位的平衡位置上,如下圖所示:
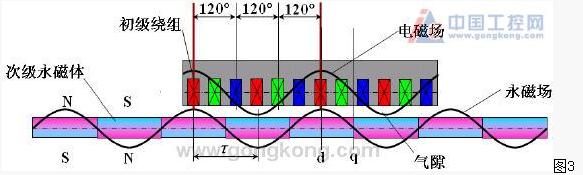
對比上面的圖3和圖2可見,雖然U相繞組(紅色)的位置同處于電磁場波形的峰值中心(特定角度),但FOC控制下,U相中心與永磁體的q軸對齊,而空載定向時,U相中心卻與d軸對齊,也就實現了a軸或α軸與d軸間的對齊關系,此時相位對齊到電角度0度,電機繞組中施加的轉子定向電流的方向為U相入,VW出,由于V相與W相是并聯關系,流經V相和W相的電流有可能出現不平衡,從而影響轉子定向的準確性。
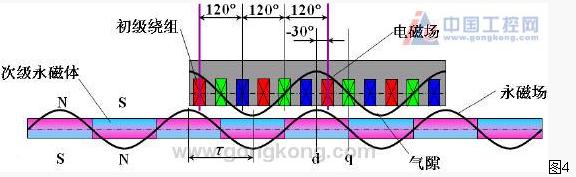
實用化的轉子定向電流施加方法是U入,V出,即U相與V相串聯,可獲得幅值完全一致的U相和V相電流,有利于定向的準確性,此時U相繞組(紅色)的位置與d軸差30度電角度,即a軸或α軸對齊到與d差(負)30度的電角度位置上,如圖所示
上述兩種轉子定向方法對應的繞組相反電勢波形和線反電勢,以及電角度的關系如下圖所示,棕色線為a軸或α軸與d軸對齊,即直接對齊到電角度0點,紫色線為a軸或α軸對齊到與d差(負)30度的電角度位置,即對齊到-30度電角度點:
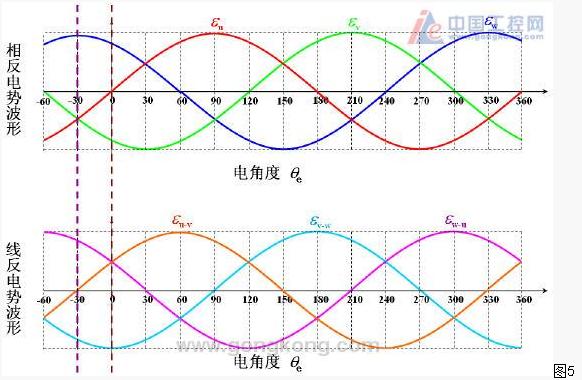
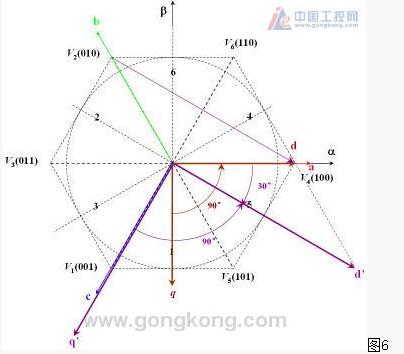
d、q軸矢量與a、b、c軸或α、β軸之間的角度的關系如下圖所示,棕色線d軸與a軸或α軸對齊,即直接對齊到電角度0點,紫色線為d‘軸與a軸或α軸相差30度,即對齊到-30度電角度點:
 增量式編碼器的相位對齊方式
增量式編碼器的相位對齊方式 在此討論中,增量式編碼器的輸出信號為方波信號,又可以分為帶換相信號的增量式編碼器和普通的增量式編碼器,普通的增量式編碼器具備兩相正交方波脈沖輸出信號A和B,以及零位信號Z;帶換相信號的增量式編碼器除具備ABZ輸出信號外,還具備互差120度的電子換相信號UVW,UVW各自的每轉周期數與電機轉子的磁極對數一致。帶換相信號的增量式編碼器的UVW電子換相信號的相位與轉子磁極相位,或曰電角度相位之間的對齊方法如下:
1.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出,將電機軸定向至一個平衡位置;
2.用示波器觀察編碼器的U相信號和Z信號;
3.調整編碼器轉軸與電機軸的相對位置;
4.一邊調整,一邊觀察編碼器U相信號跳變沿,和Z信號,直到Z信號穩定在高電平上(在此默認Z信號的常態為低電平),鎖定編碼器與電機的相對位置關系;
5.來回扭轉電機軸,撒手后,若電機軸每次自由回復到平衡位置時,Z信號都能穩定在高電平上,則對齊有效。
撤掉直流電源后,驗證如下:
1.用示波器觀察編碼器的U相信號和電機的UV線反電勢波形;
2.轉動電機軸,編碼器的U相信號上升沿與電機的UV線反電勢波形由低到高的過零點重合,編碼器的Z信號也出現在這個過零點上。
上述驗證方法,也可以用作對齊方法。
需要注意的是,此時增量式編碼器的U相信號的相位零點即與電機UV線反電勢的相位零點對齊,由于電機的U相反電勢,與UV線反電勢之間相差30度,因而這樣對齊后,增量式編碼器的U相信號的相位零點與電機U相反電勢的-30度相位點對齊,而電機電角度相位與U相反電勢波形的相位一致,所以此時增量式編碼器的U相信號的相位零點與電機電角度相位的-30度點對齊。
有些伺服企業習慣于將編碼器的U相信號零點與電機電角度的零點直接對齊,為達到此目的,可以:
1.用3個阻值相等的電阻接成星型,然后將星型連接的3個電阻分別接入電機的UVW三相繞組引線;
2.以示波器觀察電機U相輸入與星型電阻的中點,就可以近似得到電機的U相反電勢波形;
3.依據操作的方便程度,調整編碼器轉軸與電機軸的相對位置,或者編碼器外殼與電機外殼的相對位置;
4.一邊調整,一邊觀察編碼器的U相信號上升沿和電機U相反電勢波形由低到高的過零點,最終使上升沿和過零點重合,鎖定編碼器與電機的相對位置關系,完成對齊。
由于普通增量式編碼器不具備UVW相位信息,而Z信號也只能反映一圈內的一個點位,不具備直接的相位對齊潛力,因而不作為本討論的話題。
絕對式編碼器的相位對齊方式 絕對式編碼器的相位對齊對于單圈和多圈而言,差別不大,其實都是在一圈內對齊編碼器的檢測相位與電機電角度的相位。早期的絕對式編碼器會以單獨的引腳給出單圈相位的最高位的電平,利用此電平的0和1的翻轉,也可以實現編碼器和電機的相位對齊,方法如下:
1.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出,將電機軸定向至一個平衡位置;
2.用示波器觀察絕對編碼器的最高計數位電平信號;
3.調整編碼器轉軸與電機軸的相對位置;
4.一邊調整,一邊觀察最高計數位信號的跳變沿,直到跳變沿準確出現在電機軸的定向平衡位置處,鎖定編碼器與電機的相對位置關系;
5.來回扭轉電機軸,撒手后,若電機軸每次自由回復到平衡位置時,跳變沿都能準確復現,則對齊有效。
這類絕對式編碼器目前已經被采用EnDAT,BiSS,Hyperface等串行協議,以及日系專用串行協議的新型絕對式編碼器廣泛取代,因而最高位信號就不符存在了,此時對齊編碼器和電機相位的方法也有所變化,其中一種非常實用的方法是利用編碼器內部的EEPROM,存儲編碼器隨機安裝在電機軸上后實測的相位,具體方法如下:
1.將編碼器隨機安裝在電機上,即固結編碼器轉軸與電機軸,以及編碼器外殼與電機外殼;
2.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出,將電機軸定向至一個平衡位置;
3.用伺服驅動器讀取絕對編碼器的單圈位置值,并存入編碼器內部記錄電機電角度初始相位的EEPROM中;
4.對齊過程結束。
由于此時電機軸已定向于電角度相位的-30度方向,因此存入的編碼器內部EEPROM中的位置檢測值就對應電機電角度的-30度相位。此后,驅動器將任意時刻的單圈位置檢測數據與這個存儲值做差,并根據電機極對數進行必要的換算,再加上-30度,就可以得到該時刻的電機電角度相位。
這種對齊方式需要編碼器和伺服驅動器的支持和配合方能實現,日系伺服的編碼器相位之所以不便于最終用戶直接調整的根本原因就在于不肯向用戶提供這種對齊方式的功能界面和操作方法。這種對齊方法的一大好處是,只需向電機繞組提供確定相序和方向的轉子定向電流,無需調整編碼器和電機軸之間的角度關系,因而編碼器可以以任意初始角度直接安裝在電機上,且無需精細,甚至簡單的調整過程,操作簡單,工藝性好。
如果絕對式編碼器既沒有可供使用的EEPROM,又沒有可供檢測的最高計數位引腳,則對齊方法會相對復雜。如果驅動器支持單圈絕對位置信息的讀出和顯示,則可以考慮:
1.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出,將電機軸定向至一個平衡位置;
2.利用伺服驅動器讀取并顯示絕對編碼器的單圈位置值;
3.調整編碼器轉軸與電機軸的相對位置;
4.經過上述調整,使顯示的單圈絕對位置值充分接近根據電機的極對數折算出來的電機-30度電角度所應對應的單圈絕對位置點,鎖定編碼器與電機的相對位置關系;
5.來回扭轉電機軸,撒手后,若電機軸每次自由回復到平衡位置時,上述折算位置點都能準確復現,則對齊有效。
如果用戶連絕對值信息都無法獲得,那么就只能借助原廠的專用工裝,一邊檢測絕對位置檢測值,一邊檢測電機電角度相位,利用工裝,調整編碼器和電機的相對角位置關系,將編碼器相位與電機電角度相位相互對齊,然后再鎖定。這樣一來,用戶就更加無從自行解決編碼器的相位對齊問題了。
個人推薦采用在EEPROM中存儲初始安裝位置的方法,簡單,實用,適應性好,便于向用戶開放,以便用戶自行安裝編碼器,并完成電機電角度的相位整定。
正余弦編碼器的相位對齊方式 普通的正余弦編碼器具備一對正交的sin,cos 1Vp-p信號,相當于方波信號的增量式編碼器的AB正交信號,每圈會重復許許多多個信號周期,比如2048等;以及一個窄幅的對稱三角波Index信號,相當于增量式編碼器的Z信號,一圈一般出現一個;這種正余弦編碼器實質上也是一種增量式編碼器。另一種正余弦編碼器除了具備上述正交的sin、cos信號外,還具備一對一圈只出現一個信號周期的相互正交的1Vp-p的正弦型C、D信號,如果以C信號為sin,則D信號為cos,通過sin、cos信號的高倍率細分技術,不僅可以使正余弦編碼器獲得比原始信號周期更為細密的名義檢測分辨率,比如2048線的正余弦編碼器經2048細分后,就可以達到每轉400多萬線的名義檢測分辨率,當前很多歐美伺服廠家都提供這類高分辨率的伺服系統,而國內廠家尚不多見;此外帶C、D信號的正余弦編碼器的C、D信號經過細分后,還可以提供較高的每轉絕對位置信息,比如每轉2048個絕對位置,因此帶C、D信號的正余弦編碼器可以視作一種模擬式的單圈絕對編碼器。
采用這種編碼器的伺服電機的初始電角度相位對齊方式如下:
1.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出,將電機軸定向至一個平衡位置;
2.用示波器觀察正余弦編碼器的C信號波形;
3.調整編碼器轉軸與電機軸的相對位置;
4.一邊調整,一邊觀察C信號波形,直到由低到高的過零點準確出現在電機軸的定向平衡位置處,鎖定編碼器與電機的相對位置關系;
5.來回扭轉電機軸,撒手后,若電機軸每次自由回復到平衡位置時,過零點都能準確復現,則對齊有效。
撤掉直流電源后,驗證如下:
1.用示波器觀察編碼器的C相信號和電機的UV線反電勢波形;
2.轉動電機軸,編碼器的C相信號由低到高的過零點與電機的UV線反電勢波形由低到高的過零點重合。
這種驗證方法,也可以用作對齊方法。
此時C信號的過零點與電機電角度相位的-30度點對齊。
如果想直接和電機電角度的0度點對齊,可以考慮:
1.用3個阻值相等的電阻接成星型,然后將星型連接的3個電阻分別接入電機的UVW三相繞組引線;
2.以示波器觀察電機U相輸入與星型電阻的中點,就可以近似得到電機的U相反電勢波形;
3.調整編碼器轉軸與電機軸的相對位置;
4.一邊調整,一邊觀察編碼器的C相信號由低到高的過零點和電機U相反電勢波形由低到高的過零點,最終使2個過零點重合,鎖定編碼器與電機的相對位置關系,完成對齊。
由于普通正余弦編碼器不具備一圈之內的相位信息,而Index信號也只能反映一圈內的一個點位,不具備直接的相位對齊潛力,因而在此也不作為討論的話題。
如果可接入正余弦編碼器的伺服驅動器能夠為用戶提供從C、D中獲取的單圈絕對位置信息,則可以考慮:
1.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出,將電機軸定向至一個平衡位置;
2.利用伺服驅動器讀取并顯示從C、D信號中獲取的單圈絕對位置信息;
3.調整旋變軸與電機軸的相對位置;
4.經過上述調整,使顯示的絕對位置值充分接近根據電機的極對數折算出來的電機-30度電角度所應對應的絕對位置點,鎖定編碼器與電機的相對位置關系;
5.來回扭轉電機軸,撒手后,若電機軸每次自由回復到平衡位置時,上述折算絕對位置點都能準確復現,則對齊有效。
此后可以在撤掉直流電源后,得到與前面基本相同的對齊驗證效果:
1.用示波器觀察正余弦編碼器的C相信號和電機的UV線反電勢波形;
2.轉動電機軸,驗證編碼器的C相信號由低到高的過零點與電機的UV線反電勢波形由低到高的過零點重合。
如果利用驅動器內部的EEPROM等非易失性存儲器,也可以存儲正余弦編碼器隨機安裝在電機軸上后實測的相位,具體方法如下:
1.將正余弦隨機安裝在電機上,即固結編碼器轉軸與電機軸,以及編碼器外殼與電機外殼;
2.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出,將電機軸定向至一個平衡位置;
3.用伺服驅動器讀取由C、D信號解析出來的單圈絕對位置值,并存入驅動器內部記錄電機電角度初始安裝相位的EEPROM等非易失性存儲器中;
4.對齊過程結束。
由于此時電機軸已定向于電角度相位的-30度方向,因此存入的驅動器內部EEPROM等非易失性存儲器中的位置檢測值就對應電機電角度的-30度相位。此后,驅動器將任意時刻由編碼器解析出來的與電角度相關的單圈絕對位置值與這個存儲值做差,并根據電機極對數進行必要的換算,再加上-30度,就可以得到該時刻的電機電角度相位。
這種對齊方式需要伺服驅動器的在國內和操作上予以支持和配合方能實現,而且由于記錄電機電角度初始相位的EEPROM等非易失性存儲器位于伺服驅動器中,因此一旦對齊后,電機就和驅動器事實上綁定了,如果需要更換電機、正余弦編碼器、或者驅動器,都需要重新進行初始安裝相位的對齊操作,并重新綁定電機和驅動器的配套關系。
旋轉變壓器的相位對齊方式 旋轉變壓器簡稱旋變,是由經過特殊電磁設計的高性能硅鋼疊片和漆包線構成的,相比于采用光電技術的編碼器而言,具有耐熱,耐振。耐沖擊,耐油污,甚至耐腐蝕等惡劣工作環境的適應能力,因而為武器系統等工況惡劣的應用廣泛采用,一對極(單速)的旋變可以視作一種單圈絕對式反饋系統,應用也最為廣泛,因而在此僅以單速旋變為討論對象,多速旋變與伺服電機配套,個人認為其極對數最好采用電機極對數的約數,一便于電機度的對應和極對數分解。
旋變的信號引線一般為6根,分為3組,分別對應一個激勵線圈,和2個正交的感應線圈,激勵線圈接受輸入的正弦型激勵信號,感應線圈依據旋變轉定子的相互角位置關系,感應出來具有SIN和COS包絡的檢測信號。旋變SIN和COS輸出信號是根據轉定子之間的角度對激勵正弦信號的調制結果,如果激勵信號是sinωt,轉定子之間的角度為θ,則SIN信號為sinωt×sinθ,則COS信號為sinωt×cosθ,根據SIN,COS信號和原始的激勵信號,通過必要的檢測電路,就可以獲得較高分辨率的位置檢測結果,目前商用旋變系統的檢測分辨率可以達到每圈2的12次方,即4096,而科學研究和航空航天系統甚至可以達到2的20次方以上,不過體積和成本也都非常可觀。
商用旋變與伺服電機電角度相位的對齊方法如下:
1.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出;
2.然后用示波器觀察旋變的SIN線圈的信號引線輸出;
3.依據操作的方便程度,調整電機軸上的旋變轉子與電機軸的相對位置,或者旋變定子與電機外殼的相對位置;
4.一邊調整,一邊觀察旋變SIN信號的包絡,一直調整到信號包絡的幅值完全歸零,鎖定旋變;
5.來回扭轉電機軸,撒手后,若電機軸每次自由回復到平衡位置時,信號包絡的幅值過零點都能準確復現,則對齊有效 。
撤掉直流電源,進行對齊驗證:
1.用示波器觀察旋變的SIN信號和電機的UV線反電勢波形;
2.轉動電機軸,驗證旋變的SIN信號包絡過零點與電機的UV線反電勢波形由低到高的過零點重合。
這個驗證方法,也可以用作對齊方法。
此時SIN信號包絡的過零點與電機電角度相位的-30度點對齊。
如果想直接和電機電角度的0度點對齊,可以考慮:
1.用3個阻值相等的電阻接成星型,然后將星型連接的3個電阻分別接入電機的UVW三相繞組引線;
2.以示波器觀察電機U相輸入與星型電阻的中點,就可以近似得到電機的U相反電勢波形;
3.依據操作的方便程度,調整編碼器轉軸與電機軸的相對位置,或者編碼器外殼與電機外殼的相對位置;
4.一邊調整,一邊觀察旋變的SIN信號包絡的過零點和電機U相反電勢波形由低到高的過零點,最終使這2個過零點重合,鎖定編碼器與電機的相對位置關系,完成對齊。
需要指出的是,在上述操作中需有效區分旋變的SIN包絡信號中的正半周和負半周。由于SIN信號是以轉定子之間的角度為θ的sinθ值對激勵信號的調制結果,因而與sinθ的正半周對應的SIN信號包絡中,被調制的激勵信號與原始激勵信號同相,而與sinθ的負半周對應的SIN信號包絡中,被調制的激勵信號與原始激勵信號反相,據此可以區別判斷旋變輸出的SIN包絡信號波形中的正半周和負半周,對齊時,需要取sinθ由負半周向正半周過渡點對應的SIN包絡信號的過零點,如果取反了,或者未加準確判斷的話,對齊后的電角度有可能錯位180度,從而有可能造成速度外環進入正反饋。
如果可接入旋變的伺服驅動器能夠為用戶提供從旋變信號中獲取的與電機電角度相關的絕對位置信息,則可以考慮:
1.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出,將電機軸定向至一個平衡位置;
2.利用伺服驅動器讀取并顯示從旋變信號中獲取的與電機電角度相關的絕對位置信息;
3.依據操作的方便程度,調整旋變軸與電機軸的相對位置,或者旋變外殼與電機外殼的相對位置;
4.經過上述調整,使顯示的絕對位置值充分接近根據電機的極對數折算出來的電機-30度電角度所應對應的絕對位置點,鎖定編碼器與電機的相對位置關系;
5.來回扭轉電機軸,撒手后,若電機軸每次自由回復到平衡位置時,上述折算絕對位置點都能準確復現,則對齊有效。
此后可以在撤掉直流電源后,得到與前面基本相同的對齊驗證效果:
1.用示波器觀察旋變的SIN信號和電機的UV線反電勢波形;
2.轉動電機軸,驗證旋變的SIN信號包絡過零點與電機的UV線反電勢波形由低到高的過零點重合。
如果利用驅動器內部的EEPROM等非易失性存儲器,也可以存儲旋變隨機安裝在電機軸上后實測的相位,具體方法如下:
1.將旋變隨機安裝在電機上,即固結旋變轉軸與電機軸,以及旋變外殼與電機外殼;
2.用一個直流電源給電機的UV繞組通以小于額定電流的直流電,U入,V出,將電機軸定向至一個平衡位置;
3.用伺服驅動器讀取由旋變解析出來的與電角度相關的絕對位置值,并存入驅動器內部記錄電機電角度初始安裝相位的EEPROM等非易失性存儲器中;
4.對齊過程結束。
由于此時電機軸已定向于電角度相位的-30度方向,因此存入的驅動器內部EEPROM等非易失性存儲器中的位置檢測值就對應電機電角度的-30度相位。此后,驅動器將任意時刻由旋變解析出來的與電角度相關的絕對位置值與這個存儲值做差,并根據電機極對數進行必要的換算,再加上-30度,就可以得到該時刻的電機電角度相位。
這種對齊方式需要伺服驅動器的在國內和操作上予以支持和配合方能實現,而且由于記錄電機電角度初始相位的EEPROM等非易失性存儲器位于伺服驅動器中,因此一旦對齊后,電機就和驅動器事實上綁定了,如果需要更換電機、旋變、或者驅動器,都需要重新進行初始安裝相位的對齊操作,并重新綁定電機和驅動器的配套關系。
注意
1.以上討論中,所謂對齊到電機電角度的-30度相位的提法,是以UV反電勢波形滯后于U相30度的前提為條件。
2.以上討論中,都以UV相通電,并參考UV線反電勢波形為例,有些伺服系統的對齊方式可能會采用UW相通電并參考UW線反電勢波形。
3.如果想直接對齊到電機電角度0度相位點,也可以將U相接入低壓直流源的正極,將V相和W相并聯后接入直流源的負端,此時電機軸的定向角相對于UV相串聯通電的方式會偏移30度,以文中給出的相應對齊方法對齊后,原則上將對齊于電機電角度的0度相位,而不再有-30度的偏移量。這樣做看似有好處,但是考慮電機繞組的參數不一致性,V相和W相并聯后,分別流經V相和W相繞組的電流很可能并不一致,從而會影響電機軸定向角度的準確性。而在UV相通電時,U相和V相繞組為單純的串聯關系,因此流經U相和V相繞組的電流必然是一致的,電機軸定向角度的準確性不會受到繞組定向電流的影響。
4.不排除伺服廠商有意將初始相位錯位對齊的可能性,尤其是在可以提供絕對位置數據的反饋系統中,初始相位的錯位對齊將很容易被數據的偏置量補償回來,以此種方式也許可以起到某種保護自己產品線的作用。只是這樣一來,用戶就更加無從知道伺服電機反饋元件的初始相位到底該對齊到哪兒了。用戶自然也不愿意遇到這樣的供應商。
電角度相位對齊的基本方法總結 1.波形觀察法
適用于帶換相信號的增量式編碼器、正余弦編碼、旋轉變壓器。
1) 以示波器直接觀察UV線反電勢波形過零點與傳感器的U相信號上升沿/Z信號、或Sin信號過零點、或Sin包絡信號過零點的相位對齊關系,以此方法可以將傳感器的上述信號邊沿或過零點對齊到-30度電角度相位;
2) 以阻值范圍適當的三個等值電阻構成星形,接入永磁伺服電機的UVW動力線,以示波器觀察U相動力線與星形等值電阻的中心點之間的虛擬U相反電勢波形與與傳感器的U相信號上升沿/Z信號、或Sin信號過零點、或Sin包絡信號過零點的相位對齊關系,以此方法可以將傳感器的上述信號邊沿或過零點對齊到電角度相位0點;
2.轉子定向法
適用于帶換相信號的增量式編碼器、正余弦編碼、旋轉變壓器的波形對齊,或者絕對式編碼器和正余弦編碼、旋轉變壓器等按可提供單圈絕對位置數值信息對齊。
1) 將U相接入低壓直流源的正極,V相接入直流源的負端,定向電機軸
此后一邊調整傳感器與電機的相對位置關系,一邊以示波器觀察傳感器信號,直到U相信號上升沿/Z信號、或Sin信號過零點、或Sin包絡信號過零點準確復現,以此方法可以將傳感器的上述信號邊沿或過零點對齊到 -30度電角度相位;
也可以一邊調整傳感器與電機的相對位置關系,一邊設法觀察單圈絕對位置的數值信息,直到數據零位準確復現,以此方法也可以將傳感器的單圈絕對位置零點對齊到 -30度電角度相位;
如果事先估算出 -30度電角度對應的單圈絕對位置的數值,還可以調整傳感器與電機的相對位置關系,直到該數值準確復現,就可以將單圈絕對位置零點直接對齊到電角度相位0點(該方法可能比將在下一面 2) 中總結的后一條方法精確度更好一些);
當然也完全可以不調整傳感器與電機的相對位置關系,而是簡單地隨機安裝編碼器,把讀取到的單圈絕對位置信息作為初始安裝的偏置值,通過后續運算,實現單圈絕對位置信息和電角度相位零點的邏輯對齊,該方法的人工操作要求最低。
2) 將U相接入低壓直流源的正極,將V相和W相并聯后接入直流源的負端,定向電機軸
此后一邊調整傳感器與電機的相對位置關系,一邊以示波器觀察傳感器信號,直到U相信號上升沿/Z信號、或Sin信號過零點、或Sin包絡信號過零點準確復現,以此方法可以將傳感器的上述信號邊沿或過零點對齊到電角度相位0點;
也可以一邊調整傳感器與電機的相對位置關系,一邊設法觀察單圈絕對位置的數值信息,直到數據零位準確復現,以此方法也可以將傳感器的上述信號邊沿或過零點對齊到電角度相位0點。
[ 此帖被王銳在2009-01-31 19:30重新編輯 ]
 滬公網安備31010802001143號
滬公網安備31010802001143號

